Research interests
Overall, I am interested in computational algorithms and dynamical systems. My group focuses on research in state-of-the-art computational optimization and machine learning algorithms.
Specifically, I started my research career in optimization and subsequently became interested in robustness of optimization and machine learning algorithms. Those require us to use computational optimization tools that can manipulate probability distributions, which are inherently infinite-dimensional. It led me to my current interests in variational methods for machine learning and optimization over probability distributions, rooted in the theory of gradient flows and optimal transport from PDE analysis.
Earlier in my career, I was interested in the robustness of optimization, control, and machine learning algorithms. That requires us to use computational optimization tools that can manipulate probability distributions, which are inherently infinite-dimensional. It led me to my current interests in mathematical foundations for machine learning and optimization over probability distributions, rooted in PDE, gradient flows, and optimal transport.
For example, in some of my previous works, I invented robust ML algorithms that can protect against distribution shifts using principled kernel methods. Those optimization algorithms have deep theoretical roots such as the analysis of PDEs. Following that, I dedicate my current research to interfacing computational algorithms in machine learning/optimization using PDE gradient flows and optimal transport. Recently, I became interested in the Hellinger geometry (a.k.a. Fisher-Rao), e.g., kernel methods and (Wasserstein-)Fisher-Rao, a.k.a. (spherical-) Hellinger-Kantorovich, gradient flows.
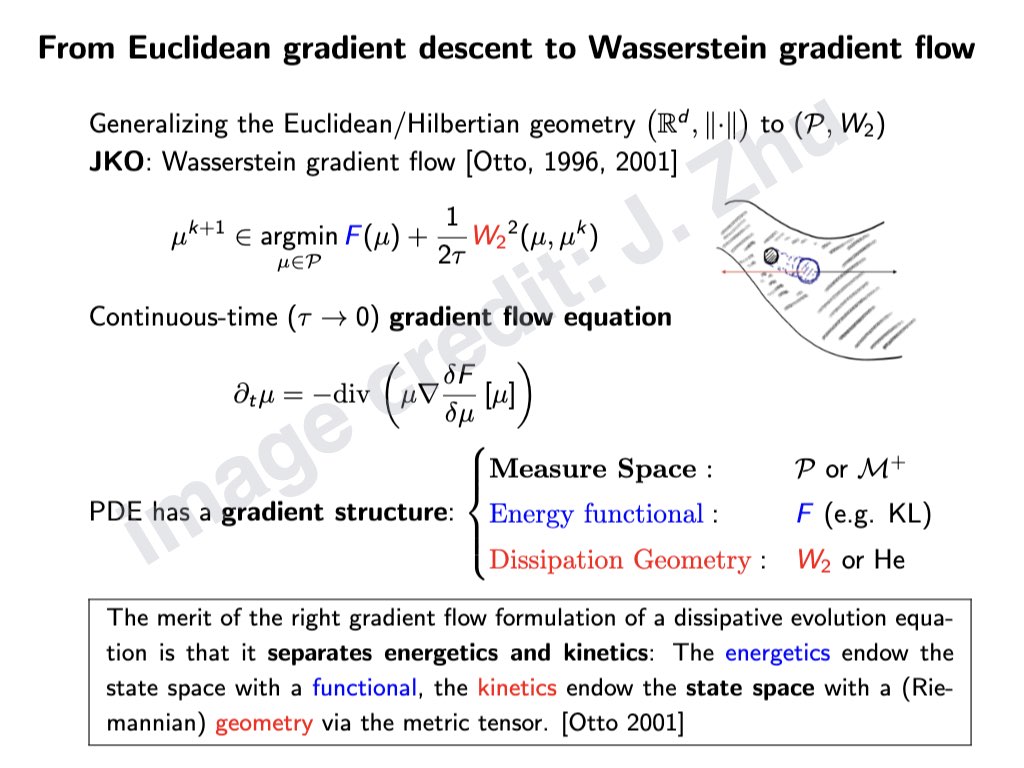
For example, data distribution can be described by an evolutionary differential equation (PDE/SDE) \(\partial _t \mu_t = \mathcal L\ \mu_t,\)
where just as in continuous optimization, the differential equation can be driven by the gradient of certain system energy. Our goal is then to study this time evolution of the data distribution \(\mu_t(x)\) for large-scale computation and learning. Different from, for example, classical PDE methods, we take a variational approach, i.e., we view the time-evolution to be driven by an energy functional \(\mathcal E\). This is equivalent to viewing the dynamics as the path of an optimization problem
\(\min_\mu \mathcal{E}(\mu).\)
For example, the energy function can be chosen as the KL divergence
\(\mathcal{E}(\mu) = \mathrm{KL}(\mu | \pi)\) as in Bayesian inference.
This is owing to the modern development of the analysis of PDE and gradient flows.
All those research topics call for a new generation of computational algorithms that can manipulate probability distributions and large-scale data structures with principled mathematical foundations and guarantees.
Publications, preprints, code
(See also my Google Scholar page.)
Conditional LDDMM flow matching: an application to uncertainty quantification.
Sarah Katz, Francesco Romor, Jia-Jie Zhu, Alfonso Caiazzo (2026). Accepted for publication in Computer Methods in Applied Mechanics and Engineering.
preprint
Gradient Flow Sampler-based Distributionally Robust Optimization.
Jia-Jie Zhu, Zusen Xu. Accepted to the Forty-Third International Conference on Machine Learning (ICML).
preprint code
Improved Stochastic Optimization of LogSumExp.
Egor Gladin, Alexey Kroshnin, Jia-Jie Zhu, Pavel Dvurechensky. Accepted to the Forty-Third International Conference on Machine Learning (ICML).
preprint
Evolution of Gaussians in the HK-Boltzmann gradient flow.
Matthias Liero, Alexander Mielke, Oliver Tse, and Jia-Jie Zhu (2025). In: Communications on Pure and Applied Analysis, to appear. Special Issue: Transport Equations in Optimization, Sampling, and Control.
preprint
An Inexact Halpern Iteration with Application to Distributionally Robust Optimization.
Ling Liang, Zusen Xu, Kim-Chuan Toh, and Jia-Jie Zhu (2024). In: Journal of Optimization Theory and Applications.
preprint
Hellinger-Kantorovich Gradient Flows: Global Exponential Decay of Entropy Functionals Alexander Mielke, Jia-Jie Zhu. preprint
Pricing American options under rough volatility using signatures
Christian Bayer, Luca Pelizzari, Jia-Jie Zhu (2025). In: Stochastic Analysis and Applications. In Honour of Terry Lyons. preprint
Inclusive KL Minimization: A Wasserstein-Fisher-Rao Gradient Flow Perspective. Jia-Jie Zhu. preprint
Interaction-Force Transport Gradient Flows. Egor Gladin, Pavel Dvurechensky, Alexander Mielke, Jia-Jie Zhu. In (to appear) Proceedings of NeurIPS 2024, the Thirty-Eighth Annual Conference on Neural Information Processing Systems. slides (NeurIPS 2024) preprint code
Kernel Approximation of Fisher-Rao Gradient Flows. Jia-Jie Zhu, Alexander Mielke preprint
Monograph: Approximation, Kernelization, and Entropy-Dissipation of Gradient Flows: from Wasserstein to Fisher-Rao. Jia-Jie Zhu, Alexander Mielke. preprint.
Analysis of Kernel Mirror Prox for Measure Optimization. Pavel Dvurechensky, Jia-Jie Zhu. AISTATS 2024 (accepted) preprint
Estimation Beyond Data Reweighting: Kernel Method of Moments. Heiner Kremer, Yassine Nemmour, Bernhard Sch ̈olkopf, and Jia-Jie Zhu. In (to appear) Proceedings of the 40th International Conference on Machine Learning, Proceedings of Machine Learning Research. PMLR, 2023. paper code
Propagating Kernel Ambiguity Sets in Nonlinear Data-driven Dynamics Models. Jia-Jie Zhu. Accepted in the 62nd IEEE Conference on Decision and Control (CDC). preprint
Wasserstein Distributionally Robust Nonlinear Model Predictive Control. Zhengang Zhong, Jia-Jie Zhu. preprint
Functional Generalized Empirical Likelihood Estimation for Conditional Moment Restrictions. Heiner Kremer, Jia-Jie Zhu, Krikamol Muandet, and Bernard Schölkopf. In the Proceedings of the 39th International Conference on Machine Learning (ICML). PMLR, 2022. paper poster
Maximum Mean Discrepancy Distributionally Robust Nonlinear Chance-Constrained Optimization with Finite-Sample Guarantee Yassine Nemmour, Heiner Kremer, Bernhard Schölkopf, Jia-Jie Zhu. 61st IEEE Conference on Decision and Control (CDC). preprint code slides (summer school)
- Note: there is an issue with the proof in this paper: one should replace it with a uniform convergence bound. The new proof will be posted with a longer version of the paper.
Adversarially Robust Kernel Smoothing. Jia-Jie Zhu, Christina Kouridi, Yassine Nemmour, Bernhard Schölkopf. Proceedings of The 25th International Conference on Artificial Intelligence and Statistics, volume 151 of Proceedings of Machine Learning Research, pages 4972–4994. PMLR, 28–30 Mar 2022. paper code slides (oral) poster
Learning Random Feature Dynamics for Uncertainty Quantification. Diego Agudelo-Espana, Yassine Nemmour, Bernhard Schölkopf, Jia-Jie Zhu. To appear in the 61st IEEE Conference on Decision and Control (CDC). preprint
Distributionally Robust Trajectory Optimization Under Uncertain Dynamics via Relative-Entropy Trust Regions. Hany Abdulsamad, Tim Dorau, Boris Belousov, Jia-Jie Zhu and Jan Peters. preprint
Distributional Robustness Regularized Scenario Optimization with Application to Model Predictive Control. Yassine Nemmour, Bernhard Schölkopf, Jia-Jie Zhu, 2021. Proceedings of the Conference on Learning for Dynamics and Control (L4DC). paper
Kernel Distributionally Robust Optimization. Jia-Jie Zhu, Wittawat Jitkrittum, Moritz Diehl, Bernhard Schölkopf, 2020. The conference version of this paper appeared in the Proceedings of the 24th International Conference on Artificial Intelligence and Statistics (AISTATS) 2021, San Diego, California, USA. PMLR: Volume 130. paper code slides (shorter version) (longer version)
Worst-Case Risk Quantification under Distributional Ambiguity using Kernel Mean Embedding in Moment Problem. Jia-Jie Zhu, Wittawat Jitkrittum, Moritz Diehl, Bernhard Schölkopf, 2020. In the 59th IEEE Conference on Decision and Control (CDC)), 2020. paper slides
Projection Algorithms for Non-Convex Minimization with Application to Sparse Principal Component Analysis. J.J. Zhu, D. Phan, W. Hager, 2015. Journal of Global Optimization, 65(4):657–676, 2016. paper code
A Kernel Mean Embedding Approach to Reducing Conservativeness in Stochastic Programming and Control. Zhu, Jia-Jie, Moritz Diehl and Bernhard Schölkopf. 2nd Annual Conference on Learning for Dynamics and Control (L4DC). In Proceedings of Machine Learning Research vol 120:1–9, 2020. paper slides
A New Distribution-Free Concept for Representing, Comparing, and Propagating Uncertainty in Dynamical Systems with Kernel Probabilistic Programming. Zhu, Jia-Jie, Krikamol Muandet, Moritz Diehl, and Bernhard Schölkopf. 21st IFAC World Congress. In IFAC-PapersOnLine proceedings, 2020. paper slides
Fast Non-Parametric Learning to Accelerate Mixed-Integer Programming for Online Hybrid Model Predictive Control. Zhu, Jia-Jie, and Martius, Georg. 21st IFAC World Congress. In IFAC-PapersOnLine proceedings, 2020. paper slides
Robust Humanoid Locomotion Using Trajectory Optimization and Sample-Efficient Learning. Yeganegi, Mohammad Hasan, Majid Khadiv, S Ali A Moosavian, Jia-Jie Zhu, Andrea Del Prete, and Ludovic Righetti. IEEE Humanoids, 2019. paper
Generative Adversarial Active Learning. J.J. Zhu, J. Bento, 2017. NIPS 2017 Workshop on Teaching Machines, Robots, and Humans. paper
Control What You Can: Intrinsically Motivated Task-Planning Agent. Blaes, Sebastian, Marin Vlastelica Pogančić, JJ Zhu, and Georg Martius. In Advances in Neural Information Processing Systems (NeurIPS) 32, pages 12541– 12552. Curran Associates, Inc., 2019. paper
Deep Reinforcement Learning for Resource-Aware Control. D. Baumann, J.J. Zhu, G. Martius, S. Trimpe, 2018. IEEE CDC 2018. paper code
A Metric for Sets of Trajectories that is Practical and Mathematically Consistent. J. Bento, J.J. Zhu, 2016. paper
A Decentralized Multi-Block Algorithm for Demand-Side Primary Frequency Control Using Local Frequency Measurements. J. Brooks, W. Hager, J.J. Zhu, 2015. paper
Previous projects
- Kernel machine learning for distributionally robust optimization, Empirical Inference Department, Max Planck Institute for Intelligent Systems, Tübingen
- Marie Skołodowska-Curie Individual Fellowship on learning-control algorithms, Max Planck Institute for Intelligent Systems, Tübingen
- (More under construction …)
Open-source code
See above for more code associated with publications.
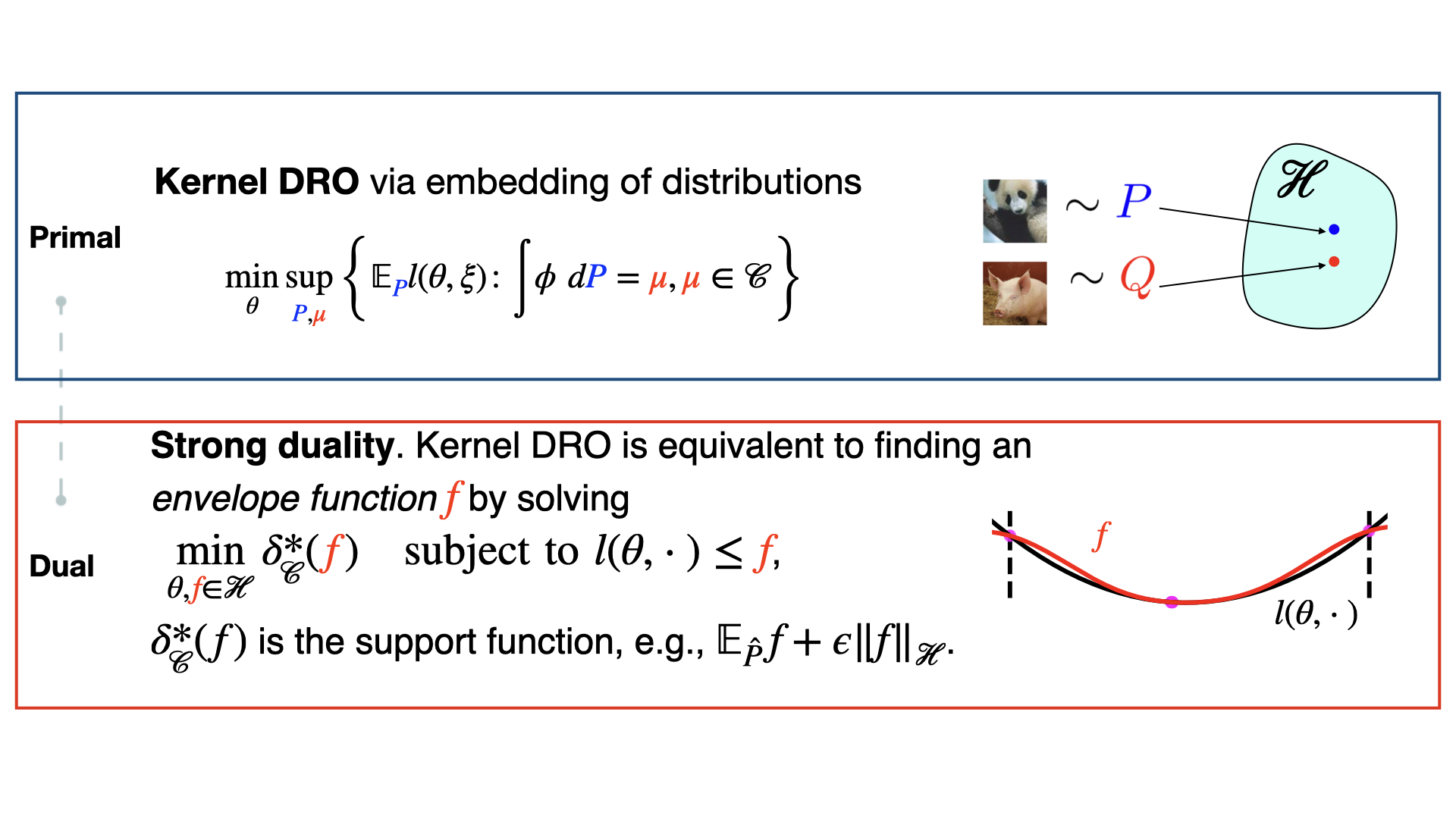
K-DRO – Kernel Distributionally Robust Optimization
K-DRO is the software implementation of Kernel Distributionally Robust Optimization (DRO), a robust machine learning and optimization algorithm that can handle nonlinear non-convex loss and model functions. It is based on a dual reformulation that turns an DRO problem into a kernel learning problem. The intuition is to find a smooth kernel function that majorizes the original loss, as demonstrated in the illustration below.
More information: https://github.com/jj-zhu/kdro
K-MoM - Kernel Method of Moments
This software repository contains several state-of-the-art estimation tools for (conditional) moment restriction problems, e.g., for instrumental variable (IV) regression.
More information: https://github.com/HeinerKremer/conditional-moment-restrictions
MMD-DR-CCSP – Maximum Mean Discrepancy Distributionally Robust Nonlinear Chance-Constrained Programming
MMD-DR-CCSP applies the Kernel Distributionally Robust Optimization methodology. Compared with other DR-CCSP algorithms, it can handle nonlinear change constraints with computable finite-sample guarantees.
More information: https://github.com/yasnem/CC_Tutorial_TUB_Oxford
ARKS – Adversarially Robust Kernel Smoothing
ARKS is a large-scale implementation of kernel methods for distributionally robust optimization. It is based on the idea of using a diffusion process to robustify the learning algorithms.
More information: https://github.com/christinakouridi/arks